-
Notifications
You must be signed in to change notification settings - Fork 0
/
02_CNN.py
938 lines (734 loc) · 52.5 KB
/
02_CNN.py
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
385
386
387
388
389
390
391
392
393
394
395
396
397
398
399
400
401
402
403
404
405
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
422
423
424
425
426
427
428
429
430
431
432
433
434
435
436
437
438
439
440
441
442
443
444
445
446
447
448
449
450
451
452
453
454
455
456
457
458
459
460
461
462
463
464
465
466
467
468
469
470
471
472
473
474
475
476
477
478
479
480
481
482
483
484
485
486
487
488
489
490
491
492
493
494
495
496
497
498
499
500
501
502
503
504
505
506
507
508
509
510
511
512
513
514
515
516
517
518
519
520
521
522
523
524
525
526
527
528
529
530
531
532
533
534
535
536
537
538
539
540
541
542
543
544
545
546
547
548
549
550
551
552
553
554
555
556
557
558
559
560
561
562
563
564
565
566
567
568
569
570
571
572
573
574
575
576
577
578
579
580
581
582
583
584
585
586
587
588
589
590
591
592
593
594
595
596
597
598
599
600
601
602
603
604
605
606
607
608
609
610
611
612
613
614
615
616
617
618
619
620
621
622
623
624
625
626
627
628
629
630
631
632
633
634
635
636
637
638
639
640
641
642
643
644
645
646
647
648
649
650
651
652
653
654
655
656
657
658
659
660
661
662
663
664
665
666
667
668
669
670
671
672
673
674
675
676
677
678
679
680
681
682
683
684
685
686
687
688
689
690
691
692
693
694
695
696
697
698
699
700
701
702
703
704
705
706
707
708
709
710
711
712
713
714
715
716
717
718
719
720
721
722
723
724
725
726
727
728
729
730
731
732
733
734
735
736
737
738
739
740
741
742
743
744
745
746
747
748
749
750
751
752
753
754
755
756
757
758
759
760
761
762
763
764
765
766
767
768
769
770
771
772
773
774
775
776
777
778
779
780
781
782
783
784
785
786
787
788
789
790
791
792
793
794
795
796
797
798
799
800
801
802
803
804
805
806
807
808
809
810
811
812
813
814
815
816
817
818
819
820
821
822
823
824
825
826
827
828
829
830
831
832
833
834
835
836
837
838
839
840
841
842
843
844
845
846
847
848
849
850
851
852
853
854
855
856
857
858
859
860
861
862
863
864
865
866
867
868
869
870
871
872
873
874
875
876
877
878
879
880
881
882
883
884
885
886
887
888
889
890
891
892
893
894
895
896
897
898
899
900
901
902
903
904
905
906
907
908
909
910
911
912
913
914
915
916
917
918
919
920
921
922
923
924
925
926
927
928
929
930
931
932
933
934
935
936
937
938
# -*- coding: utf-8 -*-
"""02_cnns_sol.ipynb
Automatically generated by Colaboratory.
Original file is located at
https://colab.research.google.com/drive/1M0ykQf2OIwDl-gmPtLeWViEURaQ1IuYW
# 02. CNNs
**Disclaimer.**
This colab is based on
1. [Tutorial 5 of Deep Learning @ University of Amsterdam](https://colab.research.google.com/github/phlippe/uvadlc_notebooks/blob/master/docs/tutorial_notebooks/tutorial5/Inception_ResNet_DenseNet.ipynb)
2. [Tutorial 6 of Deep Learning & Applied AI @ Sapienza University](https://colab.research.google.com/github/erodola/DLAI-s2-2022/blob/main/labs/06/6_Convolutional_Neural_Networks_2022.ipynb)
## [Part 1] Convolution
Building a CNN today is very easy thanks to modern deep learning programming frameworks. As you have seen in the last notebook, the `torch.nn` package reduces the introduction of a convolution transformation to a single call to a function (e.g. ```nn.Conv2d``` for 2D data).
Nevertheless, CNNs involve many different operations and non-trivial changing in shape of the input tensor through the layers.
Keep in mind the two basic transformations introduced by CNNs:
- Convolution

- Pooling (Max pooling in the example below)
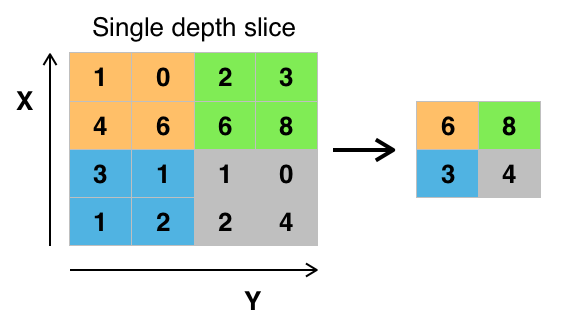
*Images from Wikipedia*
---
**Under the hood: how does a convolution work?**
Let's compute by hand a single output value of a convolution operation.
Altough simple to explain intuitively, managing and understanding how the *dimensions* involved behave in the computation can be *outstandingly* confusing.
"""
batch_size, num_channels, width, height = 1, 2, 4, 4
a = torch.arange(batch_size * num_channels * width * height).reshape(batch_size, num_channels, width, height).float()
print(a, a.shape)
from torch import nn
# Define a convolution
c = nn.Conv2d(in_channels=2, out_channels=3, kernel_size=2, bias=False)
print(c)
# Let's look under the hood... somewhere there must be learnable weights...
# They have shape [3, 2, 2, 2], i.e.: [out, in, kernel, kernel]
print(c.weight, c.weight.shape)
# We define custom kernel weights for the first out channel
# In this way we can easily reproduce the computation
my_custom_2dkernel_in_channel1 = torch.tensor([[ .1, .2], [-.4, -.5, ]])
my_custom_2dkernel_in_channel2 = torch.tensor([[.4, .3], [-.42, -.45, ]])
print(my_custom_2dkernel_in_channel1, my_custom_2dkernel_in_channel1.shape)
print(my_custom_2dkernel_in_channel2, my_custom_2dkernel_in_channel2.shape)
# Modify the weights of the convolution
# out-channel 0, in-channel 0
c.weight.data[0, 0, ...] = my_custom_2dkernel_in_channel1
# out-channel 0, in-channel 1
c.weight.data[0, 1, ...] = my_custom_2dkernel_in_channel2
# ...accessing directly the .data attribute of a tensor by-passed some safety checks.
# Try to modify directly the tensor contained in weight!
# First out-channel correctly set!
print(c.weight, c.weight.shape)
# Did you notice?
# We set `kernel_size=2` to our nn.Conv2d, i.e. we have a 2x2 kernel...
#
# ...for each input channel!
# ...for each output channel! (we will consider a single out-channel in this manual unrolling for simplicity)
"""### Q1.
>
> Stop one second. Try to apply the convolution yourself!
>
> This is the input tensor with shape `torch.Size([1, 2, 4, 4])`, i.e. `[batch, channels, w, h]`:
>
> ```python
> a = tensor([[[[ 0., 1., 2., 3.],
> [ 4., 5., 6., 7.],
> [ 8., 9., 10., 11.],
> [12., 13., 14., 15.]],
>
> [[16., 17., 18., 19.],
> [20., 21., 22., 23.],
> [24., 25., 26., 27.],
> [28., 29., 30., 31.]]]])
> ```
>
> This is the kernel tensor with shape `torch.Size([3, 2, 2, 2])`, i.e. `[out_channels, in_channels, kernel_size, kernel_size]`:
>
> ```python
> c.weight = tensor([[[[ 0.1000, 0.2000],
> [-0.4000, -0.5000]],
>
> [[ 0.4000, 0.3000],
> [-0.4200, -0.4500]]],
>
>
> [[[-0.3517, 0.2366],
> [ 0.2679, 0.1289]],
>
> [[-0.2465, -0.3489],
> [-0.2871, 0.2636]]],
>
>
> [[[ 0.1697, 0.2975],
> [ 0.1852, 0.0895]],
>
> [[-0.0035, -0.2689],
> [-0.3029, -0.3307]]]], requires_grad=True)
> ```
>
> Which value will be in `output[0, 0, 0, 0]`, i.e. the first element of the output tensor after the convolution?
"""
#@title Solution 👀
# This is the result when we apply this convolution...
o = c(a)
print("1) Result of applying conv:")
print(o, o.shape)
# Let's compute the first value of the first out channel manually, i.e. this one:
print("2) First value:")
print(o[0, 0, 0, 0]) # [batch, channels, w, h]
# Take the first window of the same size of the kernel in the first in_channel of the input
f1 = a[0, 0, :2, :2]
print("3) Elements in the first window:")
print(f1)
# And the second input channel
f2 = a[0, 1, :2, :2]
print("4) Elements in the second window:")
print(f2)
# Perform a point-wise multiplication along the (input) feature dimension, between the input and the kernel.
# In this case this can be done manually in this way:
f = f1 * my_custom_2dkernel_in_channel1 + f2 * my_custom_2dkernel_in_channel2
print("5) Result of point-wise multiplication:")
print(f)
# Sum up the result
s = f.sum()
print("6) Sum of the result:")
print(s)
# i.e. the first element in the first out_channel of our output tensor
print("7) First element:")
print(o)
"""### Q2.
>
> How many parameters does this layer have?
>
> ```python
> nn.Conv2d(in_channels=5, out_channels=10, kernel_size=2, bias=True)
> ```
"""
#@title Solution 👀
# Decomment.
c = nn.Conv2d(in_channels=5, out_channels=10, kernel_size=2, bias=True)
sum(x.numel() for x in c.parameters() if x.requires_grad)
# Can you explain the result?
# How big is the bias?
"""---
## [Part 2] Set-up for Lab
In this lab, we will implement and discuss variants of modern CNN architectures. There have been many different architectures been proposed over the past few years. Some of the most impactful ones, and still relevant today, are the following: [GoogleNet](https://arxiv.org/abs/1409.4842)/Inception architecture (winner of ILSVRC 2014), [ResNet](https://arxiv.org/abs/1512.03385) (winner of ILSVRC 2015), and [DenseNet](https://arxiv.org/abs/1608.06993) (best paper award CVPR 2017). All of them were state-of-the-art models when being proposed, and the core ideas of these networks are the foundations for most current state-of-the-art architectures. Thus, it is important to understand these architectures in detail and learn how to implement them.
Let's start with importing our standard libraries here.
"""
# Commented out IPython magic to ensure Python compatibility.
# @title import dependencies
## Standard libraries
import os
import numpy as np
import random
from PIL import Image
from types import SimpleNamespace
## Imports for plotting
import matplotlib.pyplot as plt
# %matplotlib inline
from IPython.display import set_matplotlib_formats
set_matplotlib_formats('svg', 'pdf') # For export
import matplotlib
matplotlib.rcParams['lines.linewidth'] = 2.0
import seaborn as sns
sns.reset_orig()
## PyTorch
import torch
import torch.nn as nn
import torch.utils.data as data
import torch.optim as optim
# Torchvision
import torchvision
from torchvision.datasets import CIFAR10
from torchvision import transforms
"""We will use the same `set_seed` function as well as the path variables `DATASET_PATH` and `CHECKPOINT_PATH`. Adjust the paths if necessary."""
# Path to the folder where the datasets are/should be downloaded (e.g. CIFAR10)
DATASET_PATH = "../data"
# Path to the folder where the pretrained models are saved
CHECKPOINT_PATH = "../saved_models/lab2"
# Function for setting the seed
def set_seed(seed):
random.seed(seed)
np.random.seed(seed)
torch.manual_seed(seed)
if torch.cuda.is_available():
torch.cuda.manual_seed(seed)
torch.cuda.manual_seed_all(seed)
set_seed(42)
# Ensure that all operations are deterministic on GPU (if used) for reproducibility
torch.backends.cudnn.deterministic = True
torch.backends.cudnn.benchmark = False
device = torch.device("cuda:0") if torch.cuda.is_available() else torch.device("cpu")
"""We also have pretrained models and Tensorboards (more on this later) for this lab, and download them below."""
import urllib.request
from urllib.error import HTTPError
# Github URL where saved models are stored for this lab
base_url = "https://raw.githubusercontent.com/phlippe/saved_models/main/tutorial5/"
# Files to download
pretrained_files = ["GoogleNet.ckpt", "ResNet.ckpt", "ResNetPreAct.ckpt", "DenseNet.ckpt",
"tensorboards/GoogleNet/events.out.tfevents.googlenet",
"tensorboards/ResNet/events.out.tfevents.resnet",
"tensorboards/ResNetPreAct/events.out.tfevents.resnetpreact",
"tensorboards/DenseNet/events.out.tfevents.densenet"]
# Create checkpoint path if it doesn't exist yet
os.makedirs(CHECKPOINT_PATH, exist_ok=True)
# For each file, check whether it already exists. If not, try downloading it.
for file_name in pretrained_files:
file_path = os.path.join(CHECKPOINT_PATH, file_name)
if "/" in file_name:
os.makedirs(file_path.rsplit("/",1)[0], exist_ok=True)
if not os.path.isfile(file_path):
file_url = base_url + file_name
print(f"Downloading {file_url}...")
try:
urllib.request.urlretrieve(file_url, file_path)
except HTTPError as e:
print("Something went wrong. Please try to download the file from the GDrive folder, or contact the author with the full output including the following error:\n", e)
"""Throughout this lab, we will train and evaluate the models on the CIFAR10 dataset. This allows you to compare the results obtained here with the model you have implemented in the first assignment. As we have learned from the previous lab about initialization, it is important to have the data preprocessed with a zero mean. Therefore, as a first step, we will calculate the mean and standard deviation of the CIFAR dataset:"""
train_dataset = CIFAR10(root=DATASET_PATH, train=True, download=True)
DATA_MEANS = (train_dataset.data / 255.0).mean(axis=(0,1,2))
DATA_STD = (train_dataset.data / 255.0).std(axis=(0,1,2))
print("Data mean", DATA_MEANS)
print("Data std", DATA_STD)
"""We will use the above information to define a `transforms.Normalize` module which will normalize our data accordingly. Additionally, we will use data augmentation during training. This reduces the risk of overfitting and helps CNNs to generalize better. Specifically, we will apply two random augmentations.
First, we will flip each image horizontally by a chance of 50% (`transforms.RandomHorizontalFlip`). The object class usually does not change when flipping an image, and we don't expect any image information to be dependent on the horizontal orientation. This would be however different if we would try to detect digits or letters in an image, as those have a certain orientation.
The second augmentation we use is called `transforms.RandomResizedCrop`. This transformation scales the image in a small range, while eventually changing the aspect ratio, and crops it afterward in the previous size. Therefore, the actual pixel values change while the content or overall semantics of the image stays the same.
We will randomly split the training dataset into a training and a validation set. The validation set will be used for determining early stopping. After finishing the training, we test the models on the CIFAR test set.
### Q1.
Implement `test_transform` and `train_transform` for tranining and test procedures using `transforms.Compose`.
"""
#@title Solution 👀
test_transform = transforms.Compose([transforms.ToTensor(),
transforms.Normalize(DATA_MEANS, DATA_STD)
])
# For training, we add some augmentation. Networks are too powerful and would overfit.
train_transform = transforms.Compose([transforms.RandomHorizontalFlip(),
transforms.RandomResizedCrop((32,32),scale=(0.8,1.0),ratio=(0.9,1.1)),
transforms.ToTensor(),
transforms.Normalize(DATA_MEANS, DATA_STD)
])
"""### Q2.
Implement `train_loader`, `val_loader` and `test_loader` using the `data.DataLoader` module. Set `batch_size` as 128 and `num_workers` as 4; for other parameters, figure out proper values on your own :)
"""
# Loading the training dataset. We need to split it into a training and validation part
# We need to do a little trick because the validation set should not use the augmentation.
train_dataset = CIFAR10(root=DATASET_PATH, train=True, transform=train_transform, download=True)
val_dataset = CIFAR10(root=DATASET_PATH, train=True, transform=test_transform, download=True)
set_seed(42)
train_set, _ = torch.utils.data.random_split(train_dataset, [45000, 5000])
set_seed(42)
_, val_set = torch.utils.data.random_split(val_dataset, [45000, 5000])
# Loading the test set
test_set = CIFAR10(root=DATASET_PATH, train=False, transform=test_transform, download=True)
#@title Solution 👀
# We define a set of data loaders that we can use for various purposes later.
train_loader = data.DataLoader(train_set, batch_size=128, shuffle=True, drop_last=True, pin_memory=True, num_workers=4)
val_loader = data.DataLoader(val_set, batch_size=128, shuffle=False, drop_last=False, num_workers=4)
test_loader = data.DataLoader(test_set, batch_size=128, shuffle=False, drop_last=False, num_workers=4)
"""To verify that our normalization works, we can print out the mean and standard deviation of the single batch. The mean should be close to 0 and the standard deviation close to 1 for each channel:"""
imgs, _ = next(iter(train_loader))
print("Batch mean", imgs.mean(dim=[0,2,3]))
print("Batch std", imgs.std(dim=[0,2,3]))
"""Finally, let's visualize a few images from the training set, and how they look like after random data augmentation: """
NUM_IMAGES = 4
images = [train_dataset[idx][0] for idx in range(NUM_IMAGES)]
orig_images = [Image.fromarray(train_dataset.data[idx]) for idx in range(NUM_IMAGES)]
orig_images = [test_transform(img) for img in orig_images]
img_grid = torchvision.utils.make_grid(torch.stack(images + orig_images, dim=0), nrow=4, normalize=True, pad_value=0.5)
img_grid = img_grid.permute(1, 2, 0)
plt.figure(figsize=(8,8))
plt.title("Augmentation examples on CIFAR10")
plt.imshow(img_grid)
plt.axis('off')
plt.show()
plt.close()
"""## [Part 3] PyTorch Lightning
In this notebook and in many following ones, we will make use of the library [PyTorch Lightning](https://www.pytorchlightning.ai/). PyTorch Lightning is a framework that simplifies your code needed to train, evaluate, and test a model in PyTorch. It also handles logging into [TensorBoard](https://pytorch.org/tutorials/intermediate/tensorboard_tutorial.html), a visualization toolkit for ML experiments, and saving model checkpoints automatically with minimal code overhead from our side. This is extremely helpful for us as we want to focus on implementing different model architectures and spend little time on other code overhead. Note that at the time of writing/teaching, the framework has been released in version 1.6. Future versions might have a slightly changed interface and thus might not work perfectly with the code (we will try to keep it up-to-date as much as possible).
Now, we will take the first step in PyTorch Lightning, and continue to explore the framework in our other labs. First, we import the library:
"""
# PyTorch Lightning
try:
import pytorch_lightning as pl
except ModuleNotFoundError: # Google Colab does not have PyTorch Lightning installed by default. Hence, we do it here if necessary
!pip install --quiet pytorch-lightning>=1.5
import pytorch_lightning as pl
"""PyTorch Lightning comes with a lot of useful functions, such as one for setting the seed:"""
# Setting the seed
pl.seed_everything(42)
"""Thus, in the future, we don't have to define our own `set_seed` function anymore.
In PyTorch Lightning, we define `pl.LightningModule`'s (inheriting from `torch.nn.Module`) that organize our code into 5 main sections:
1. Initialization (`__init__`), where we create all necessary parameters/models
2. Optimizers (`configure_optimizers`) where we create the optimizers, learning rate scheduler, etc.
3. Training loop (`training_step`) where we only have to define the loss calculation for a single batch (the loop of optimizer.zero_grad(), loss.backward() and optimizer.step(), as well as any logging/saving operation, is done in the background)
4. Validation loop (`validation_step`) where similarly to the training, we only have to define what should happen per step
5. Test loop (`test_step`) which is the same as validation, only on a test set.
Therefore, we don't abstract the PyTorch code, but rather organize it and define some default operations that are commonly used. If you need to change something else in your training/validation/test loop, there are many possible functions you can overwrite (see the [docs](https://pytorch-lightning.readthedocs.io/en/stable/starter/introduction.html) for details).
### Q1.
Read the [docs](https://pytorch-lightning.readthedocs.io/en/stable/starter/introduction.html) and complete the implementation below:
"""
class CIFARModule(pl.LightningModule):
def __init__(self, model_name, model_hparams, optimizer_name, optimizer_hparams):
"""
Inputs:
model_name - Name of the model/CNN to run. Used for creating the model (see function below)
model_hparams - Hyperparameters for the model, as dictionary.
optimizer_name - Name of the optimizer to use. Currently supported: Adam, SGD
optimizer_hparams - Hyperparameters for the optimizer, as dictionary. This includes learning rate, weight decay, etc.
"""
super().__init__()
# Exports the hyperparameters to a YAML file, and create "self.hparams" namespace
self.save_hyperparameters()
# Create model
self.model = create_model(model_name, model_hparams)
# Create loss module
self.loss_module = nn.CrossEntropyLoss()
# Example input for visualizing the graph in Tensorboard
self.example_input_array = torch.zeros((1, 3, 32, 32), dtype=torch.float32)
def forward(self, imgs):
# Forward function that is run when visualizing the graph
return self.model(imgs)
def configure_optimizers(self):
# We will support Adam or SGD as optimizers.
if self.hparams.optimizer_name == "Adam":
# AdamW is Adam with a correct implementation of weight decay (see here for details: https://arxiv.org/pdf/1711.05101.pdf)
optimizer = optim.AdamW(
self.parameters(), **self.hparams.optimizer_hparams)
elif self.hparams.optimizer_name == "SGD":
optimizer = optim.SGD(self.parameters(), **self.hparams.optimizer_hparams)
else:
assert False, f"Unknown optimizer: \"{self.hparams.optimizer_name}\""
# We will reduce the learning rate by 0.1 after 100 and 150 epochs
scheduler = optim.lr_scheduler.MultiStepLR(
optimizer, milestones=[100, 150], gamma=0.1)
return [optimizer], [scheduler]
def training_step(self, batch, batch_idx):
# "batch" is the output of the training data loader.
imgs, labels = batch
preds = self.model(imgs)
loss = self.loss_module(preds, labels)
acc = (preds.argmax(dim=-1) == labels).float().mean()
# Logs the accuracy per epoch to tensorboard (weighted average over batches)
self.log('train_acc', acc, on_step=False, on_epoch=True)
self.log('train_loss', loss)
return loss # Return tensor to call ".backward" on
def validation_step(self, batch, batch_idx):
imgs, labels = batch
preds = self.model(imgs).argmax(dim=-1)
acc = (labels == preds).float().mean()
# By default logs it per epoch (weighted average over batches)
self.log('val_acc', acc)
def test_step(self, batch, batch_idx):
imgs, labels = batch
preds = self.model(imgs).argmax(dim=-1)
acc = (labels == preds).float().mean()
# By default logs it per epoch (weighted average over batches), and returns it afterwards
self.log('test_acc', acc)
"""We see that the code is organized and clear, which helps if someone else tries to understand your code.
Another important part of PyTorch Lightning is the concept of callbacks. Callbacks are self-contained functions that contain the non-essential logic of your Lightning Module. They are usually called after finishing a training epoch, but can also influence other parts of your training loop. For instance, we will use the following two pre-defined callbacks: `LearningRateMonitor` and `ModelCheckpoint`. The learning rate monitor adds the current learning rate to our TensorBoard, which helps to verify that our learning rate scheduler works correctly. The model checkpoint callback allows you to customize the saving routine of your checkpoints. For instance, how many checkpoints to keep, when to save, which metric to look out for, etc. We import them below:
"""
# Callbacks
from pytorch_lightning.callbacks import LearningRateMonitor, ModelCheckpoint
"""To allow running multiple different models with the same Lightning module, we define a function below that maps a model name to the model class. At this stage, the dictionary `model_dict` is empty, but we will fill it throughout the notebook with our new models."""
model_dict = {}
def create_model(model_name, model_hparams):
if model_name in model_dict:
return model_dict[model_name](**model_hparams)
else:
assert False, f"Unknown model name \"{model_name}\". Available models are: {str(model_dict.keys())}"
"""Similarly, to use the activation function as another hyperparameter in our model, we define a "name to function" dict below:"""
act_fn_by_name = {
"tanh": nn.Tanh,
"relu": nn.ReLU,
"leakyrelu": nn.LeakyReLU,
"gelu": nn.GELU
}
"""If we pass the classes or objects directly as an argument to the Lightning module, we couldn't take advantage of PyTorch Lightning's automatically hyperparameter saving and loading.
Besides the Lightning module, the second most important module in PyTorch Lightning is the `Trainer`. The trainer is responsible to execute the training steps defined in the Lightning module and completes the framework. Similar to the Lightning module, you can override any key part that you don't want to be automated, but the default settings are often the best practice to do. For a full overview, see the [documentation](https://pytorch-lightning.readthedocs.io/en/stable/trainer.html). The most important functions we use below are:
* `trainer.fit`: Takes as input a lightning module, a training dataset, and an (optional) validation dataset. This function trains the given module on the training dataset with occasional validation (default once per epoch, can be changed)
* `trainer.test`: Takes as input a model and a dataset on which we want to test. It returns the test metric on the dataset.
For training and testing, we don't have to worry about things like setting the model to eval mode (`model.eval()`) as this is all done automatically. See below how we define a training function for our models:
"""
def train_model(model_name, save_name=None, **kwargs):
"""
Inputs:
model_name - Name of the model you want to run. Is used to look up the class in "model_dict"
save_name (optional) - If specified, this name will be used for creating the checkpoint and logging directory.
"""
if save_name is None:
save_name = model_name
# Create a PyTorch Lightning trainer with the generation callback
trainer = pl.Trainer(default_root_dir=os.path.join(CHECKPOINT_PATH, save_name), # Where to save models
gpus=1 if str(device)=="cuda:0" else 0, # We run on a single GPU (if possible)
max_epochs=180, # How many epochs to train for if no patience is set
callbacks=[ModelCheckpoint(save_weights_only=True, mode="max", monitor="val_acc"), # Save the best checkpoint based on the maximum val_acc recorded. Saves only weights and not optimizer
LearningRateMonitor("epoch")], # Log learning rate every epoch
enable_progress_bar=True) # Set to False if you do not want a progress bar
trainer.logger._log_graph = True # If True, we plot the computation graph in tensorboard
trainer.logger._default_hp_metric = None # Optional logging argument that we don't need
# Check whether pretrained model exists. If yes, load it and skip training
pretrained_filename = os.path.join(CHECKPOINT_PATH, save_name + ".ckpt")
if os.path.isfile(pretrained_filename):
print(f"Found pretrained model at {pretrained_filename}, loading...")
model = CIFARModule.load_from_checkpoint(pretrained_filename) # Automatically loads the model with the saved hyperparameters
else:
pl.seed_everything(42) # To be reproducable
model = CIFARModule(model_name=model_name, **kwargs)
trainer.fit(model, train_loader, val_loader)
model = CIFARModule.load_from_checkpoint(trainer.checkpoint_callback.best_model_path) # Load best checkpoint after training
# Test best model on validation and test set
val_result = trainer.test(model, val_loader, verbose=False)
test_result = trainer.test(model, test_loader, verbose=False)
result = {"test": test_result[0]["test_acc"], "val": val_result[0]["test_acc"]}
return model, result
"""Finally, we can focus on the Convolutional Neural Networks we want to implement today: GoogleNet and ResNet.
## [Part 4] InceptionNet
The [GoogleNet](https://arxiv.org/abs/1409.4842), proposed in 2014, won the ImageNet Challenge because of its usage of the Inception modules. In general, we will mainly focus on the concept of Inception in this lab instead of the specifics of the GoogleNet, as based on Inception, there have been many follow-up works ([Inception-v2](https://arxiv.org/abs/1512.00567), [Inception-v3](https://arxiv.org/abs/1512.00567), [Inception-v4](https://arxiv.org/abs/1602.07261), [Inception-ResNet](https://arxiv.org/abs/1602.07261),...). The follow-up works mainly focus on increasing efficiency and enabling very deep Inception networks. However, for a fundamental understanding, it is sufficient to look at the original Inception block.
An Inception block applies four convolution blocks separately on the same feature map: a 1x1, 3x3, and 5x5 convolution, and a max pool operation. This allows the network to look at the same data with different receptive fields. Of course, learning only 5x5 convolution would be theoretically more powerful. However, this is not only more computation and memory heavy but also tends to overfit much easier. The overall inception block looks like below (figure credit - [Szegedy et al.](https://arxiv.org/abs/1409.4842)):
<center width="100%"><img src="https://github.com/phlippe/uvadlc_notebooks/blob/master/docs/tutorial_notebooks/tutorial5/inception_block.svg?raw=1" style="display: block; margin-left: auto; margin-right: auto;" width="500px"/></center>
The additional 1x1 convolutions before the 3x3 and 5x5 convolutions are used for dimensionality reduction. This is especially crucial as the feature maps of all branches are merged afterward, and we don't want any explosion of feature size. As 5x5 convolutions are 25 times more expensive than 1x1 convolutions, we can save a lot of computation and parameters by reducing the dimensionality before the large convolutions.
### Q1.
Implement the `InceptionBlock` referring to the description above.
"""
class InceptionBlock(nn.Module):
def __init__(self, c_in, c_red : dict, c_out : dict, act_fn):
"""
Inputs:
c_in - Number of input feature maps from the previous layers
c_red - Dictionary with keys "3x3" and "5x5" specifying the output of the dimensionality reducing 1x1 convolutions
c_out - Dictionary with keys "1x1", "3x3", "5x5", and "max"
act_fn - Activation class constructor (e.g. nn.ReLU)
"""
super().__init__()
# 1x1 convolution branch
self.conv_1x1 = nn.Sequential(
nn.Conv2d(c_in, c_out["1x1"], kernel_size=1),
nn.BatchNorm2d(c_out["1x1"]),
act_fn()
)
# 3x3 convolution branch
self.conv_3x3 = nn.Sequential(
nn.Conv2d(c_in, c_red["3x3"], kernel_size=1),
nn.BatchNorm2d(c_red["3x3"]),
act_fn(),
nn.Conv2d(c_red["3x3"], c_out["3x3"], kernel_size=3, padding=1),
nn.BatchNorm2d(c_out["3x3"]),
act_fn()
)
# 5x5 convolution branch
self.conv_5x5 = nn.Sequential(
nn.Conv2d(c_in, c_red["5x5"], kernel_size=1),
nn.BatchNorm2d(c_red["5x5"]),
act_fn(),
nn.Conv2d(c_red["5x5"], c_out["5x5"], kernel_size=5, padding=2),
nn.BatchNorm2d(c_out["5x5"]),
act_fn()
)
# Max-pool branch
self.max_pool = nn.Sequential(
nn.MaxPool2d(kernel_size=3, padding=1, stride=1),
nn.Conv2d(c_in, c_out["max"], kernel_size=1),
nn.BatchNorm2d(c_out["max"]),
act_fn()
)
def forward(self, x):
x_1x1 = self.conv_1x1(x)
x_3x3 = self.conv_3x3(x)
x_5x5 = self.conv_5x5(x)
x_max = self.max_pool(x)
x_out = torch.cat([x_1x1, x_3x3, x_5x5, x_max], dim=1)
return x_out
"""The GoogleNet architecture consists of stacking multiple Inception blocks with occasional max pooling to reduce the height and width of the feature maps. The original GoogleNet was designed for image sizes of ImageNet (224x224 pixels) and had almost 7 million parameters. As we train on CIFAR10 with image sizes of 32x32, we don't require such a heavy architecture, and instead, apply a reduced version. The number of channels for dimensionality reduction and output per filter (1x1, 3x3, 5x5, and max pooling) need to be manually specified and can be changed if interested. The general intuition is to have the most filters for the 3x3 convolutions, as they are powerful enough to take the context into account while requiring almost a third of the parameters of the 5x5 convolution.
### Q2.
Complete the implemenatation of `GoogleNet` referring to the description above
"""
class GoogleNet(nn.Module):
def __init__(self, num_classes=10, act_fn_name="relu", **kwargs):
super().__init__()
self.hparams = SimpleNamespace(num_classes=num_classes,
act_fn_name=act_fn_name,
act_fn=act_fn_by_name[act_fn_name])
self._create_network()
self._init_params()
def _create_network(self):
# A first convolution on the original image to scale up the channel size
self.input_net = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=3, padding=1),
nn.BatchNorm2d(64),
self.hparams.act_fn()
)
# Stacking inception blocks
self.inception_blocks = nn.Sequential(
InceptionBlock(64, c_red={"3x3": 32, "5x5": 16}, c_out={"1x1": 16, "3x3": 32, "5x5": 8, "max": 8}, act_fn=self.hparams.act_fn),
InceptionBlock(64, c_red={"3x3": 32, "5x5": 16}, c_out={"1x1": 24, "3x3": 48, "5x5": 12, "max": 12}, act_fn=self.hparams.act_fn),
nn.MaxPool2d(3, stride=2, padding=1), # 32x32 => 16x16
InceptionBlock(96, c_red={"3x3": 32, "5x5": 16}, c_out={"1x1": 24, "3x3": 48, "5x5": 12, "max": 12}, act_fn=self.hparams.act_fn),
InceptionBlock(96, c_red={"3x3": 32, "5x5": 16}, c_out={"1x1": 16, "3x3": 48, "5x5": 16, "max": 16}, act_fn=self.hparams.act_fn),
InceptionBlock(96, c_red={"3x3": 32, "5x5": 16}, c_out={"1x1": 16, "3x3": 48, "5x5": 16, "max": 16}, act_fn=self.hparams.act_fn),
InceptionBlock(96, c_red={"3x3": 32, "5x5": 16}, c_out={"1x1": 32, "3x3": 48, "5x5": 24, "max": 24}, act_fn=self.hparams.act_fn),
nn.MaxPool2d(3, stride=2, padding=1), # 16x16 => 8x8
InceptionBlock(128, c_red={"3x3": 48, "5x5": 16}, c_out={"1x1": 32, "3x3": 64, "5x5": 16, "max": 16}, act_fn=self.hparams.act_fn),
InceptionBlock(128, c_red={"3x3": 48, "5x5": 16}, c_out={"1x1": 32, "3x3": 64, "5x5": 16, "max": 16}, act_fn=self.hparams.act_fn)
)
# Mapping to classification output
self.output_net = nn.Sequential(
nn.AdaptiveAvgPool2d((1, 1)),
nn.Flatten(),
nn.Linear(128, self.hparams.num_classes)
)
def _init_params(self):
# Based on our discussion in Tutorial 4, we should initialize the convolutions according to the activation function
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(
m.weight, nonlinearity=self.hparams.act_fn_name)
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
def forward(self, x):
x = self.input_net(x)
x = self.inception_blocks(x)
x = self.output_net(x)
return x
"""Now, we can integrate our model to the model dictionary we defined above:"""
model_dict["GoogleNet"] = GoogleNet
"""The training of the model is handled by PyTorch Lightning, and we just have to define the command to start. Note that we train for almost 200 epochs, which takes about an hour on Lisa's default GPUs (GTX1080Ti). We would recommend using the saved models and train your own model if you are interested. """
googlenet_model, googlenet_results = train_model(model_name="GoogleNet",
model_hparams={"num_classes": 10,
"act_fn_name": "relu"},
optimizer_name="Adam",
optimizer_hparams={"lr": 1e-3,
"weight_decay": 1e-4})
"""We will compare the results later in the notebooks, but we can already print them here for a first glance:"""
print("GoogleNet Results", googlenet_results)
"""### Tensorboard log
A nice extra of PyTorch Lightning is the automatic logging into TensorBoard. To give you a better intuition of what TensorBoard can be used, we can look at the board that PyTorch Lightning has been generated when training the GoogleNet. TensorBoard provides an inline functionality for Jupyter notebooks, and we use it here:
"""
# Commented out IPython magic to ensure Python compatibility.
# Load tensorboard extension
# %load_ext tensorboard
# Commented out IPython magic to ensure Python compatibility.
# Opens tensorboard in notebook. Adjust the path to your CHECKPOINT_PATH!
# %tensorboard --logdir ../saved_models/lab2/tensorboards/GoogleNet/
"""<center width="100%"><img src="https://github.com/phlippe/uvadlc_notebooks/blob/master/docs/tutorial_notebooks/tutorial5/tensorboard_screenshot_GoogleNet.png?raw=1" width="1000px"></center>
TensorBoard is organized in multiple tabs. The main tab is the scalar tab where we can log the development of single numbers. For example, we have plotted the training loss, accuracy, learning rate, etc. If we look at the training or validation accuracy, we can really see the impact of using a learning rate scheduler. Reducing the learning rate gives our model a nice increase in training performance. Similarly, when looking at the training loss, we see a sudden decrease at this point. However, the high numbers on the training set compared to validation indicate that our model was overfitting which is inevitable for such large networks.
Another interesting tab in TensorBoard is the graph tab. It shows us the network architecture organized by building blocks from the input to the output. It basically shows the operations taken in the forward step of `CIFARModule`. Double-click on a module to open it. Feel free to explore the architecture from a different perspective. The graph visualization can often help you to validate that your model is actually doing what it is supposed to do, and you don't miss any layers in the computation graph.
## [Part 5] ResNet
The [ResNet](https://arxiv.org/abs/1512.03385) paper is one of the [most cited AI papers](https://www.natureindex.com/news-blog/google-scholar-reveals-most-influential-papers-research-citations-twenty-twenty), and has been the foundation for neural networks with more than 1,000 layers. Despite its simplicity, the idea of residual connections is highly effective as it supports stable gradient propagation through the network. Instead of modeling $x_{l+1}=F(x_{l})$, we model $x_{l+1}=x_{l}+F(x_{l})$ where $F$ is a non-linear mapping (usually a sequence of NN modules likes convolutions, activation functions, and normalizations). If we do backpropagation on such residual connections, we obtain:
$$\frac{\partial x_{l+1}}{\partial x_{l}} = \mathbf{I} + \frac{\partial F(x_{l})}{\partial x_{l}}$$
The bias towards the identity matrix guarantees a stable gradient propagation being less effected by $F$ itself. There have been many variants of ResNet proposed, which mostly concern the function $F$, or operations applied on the sum. In this lab, we look at two of them: the original ResNet block, and the [Pre-Activation ResNet block](https://arxiv.org/abs/1603.05027). We visually compare the blocks below (figure credit - [He et al.](https://arxiv.org/abs/1603.05027)):
<center width="100%"><img src="https://github.com/phlippe/uvadlc_notebooks/blob/master/docs/tutorial_notebooks/tutorial5/resnet_block.svg?raw=1" style="display: block; margin-left: auto; margin-right: auto;" width="300px"/></center>
The original ResNet block applies a non-linear activation function, usually ReLU, after the skip connection. In contrast, the pre-activation ResNet block applies the non-linearity at the beginning of $F$. Both have their advantages and disadvantages. For very deep network, however, the pre-activation ResNet has shown to perform better as the gradient flow is guaranteed to have the identity matrix as calculated above, and is not harmed by any non-linear activation applied to it. For comparison, in this notebook, we implement both ResNet types as shallow networks.
Let's start with the original ResNet block. The visualization above already shows what layers are included in $F$. One special case we have to handle is when we want to reduce the image dimensions in terms of width and height. The basic ResNet block requires $F(x_{l})$ to be of the same shape as $x_{l}$. Thus, we need to change the dimensionality of $x_{l}$ as well before adding to $F(x_{l})$. The original implementation used an identity mapping with stride 2 and padded additional feature dimensions with 0. However, the more common implementation is to use a 1x1 convolution with stride 2 as it allows us to change the feature dimensionality while being efficient in parameter and computation cost. The code for the ResNet block is relatively simple, and shown below:
### Q1.
Implement the `ResNetBlock` referring to the description above.
"""
class ResNetBlock(nn.Module):
def __init__(self, c_in, act_fn, subsample=False, c_out=-1):
"""
Inputs:
c_in - Number of input features
act_fn - Activation class constructor (e.g. nn.ReLU)
subsample - If True, we want to apply a stride inside the block and reduce the output shape by 2 in height and width
c_out - Number of output features. Note that this is only relevant if subsample is True, as otherwise, c_out = c_in
"""
super().__init__()
if not subsample:
c_out = c_in
# Network representing F
self.net = nn.Sequential(
nn.Conv2d(c_in, c_out, kernel_size=3, padding=1, stride=1 if not subsample else 2, bias=False), # No bias needed as the Batch Norm handles it
nn.BatchNorm2d(c_out),
act_fn(),
nn.Conv2d(c_out, c_out, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(c_out)
)
# 1x1 convolution with stride 2 means we take the upper left value, and transform it to new output size
self.downsample = nn.Conv2d(c_in, c_out, kernel_size=1, stride=2) if subsample else None
self.act_fn = act_fn()
def forward(self, x):
z = self.net(x)
if self.downsample is not None:
x = self.downsample(x)
out = z + x
out = self.act_fn(out)
return out
"""### Q2.
The second block we implement is the pre-activation ResNet block. For this, we have to change the order of layer in `self.net`, and do not apply an activation function on the output. Additionally, the downsampling operation has to apply a non-linearity as well as the input, $x_l$, has not been processed by a non-linearity yet. Implement the block below:
"""
class PreActResNetBlock(nn.Module):
def __init__(self, c_in, act_fn, subsample=False, c_out=-1):
"""
Inputs:
c_in - Number of input features
act_fn - Activation class constructor (e.g. nn.ReLU)
subsample - If True, we want to apply a stride inside the block and reduce the output shape by 2 in height and width
c_out - Number of output features. Note that this is only relevant if subsample is True, as otherwise, c_out = c_in
"""
super().__init__()
if not subsample:
c_out = c_in
# Network representing F
self.net = nn.Sequential(
nn.BatchNorm2d(c_in),
act_fn(),
nn.Conv2d(c_in, c_out, kernel_size=3, padding=1, stride=1 if not subsample else 2, bias=False),
nn.BatchNorm2d(c_out),
act_fn(),
nn.Conv2d(c_out, c_out, kernel_size=3, padding=1, bias=False)
)
# 1x1 convolution needs to apply non-linearity as well as not done on skip connection
self.downsample = nn.Sequential(
nn.BatchNorm2d(c_in),
act_fn(),
nn.Conv2d(c_in, c_out, kernel_size=1, stride=2, bias=False)
) if subsample else None
def forward(self, x):
z = self.net(x)
if self.downsample is not None:
x = self.downsample(x)
out = z + x
return out
"""Similarly to the model selection, we define a dictionary to create a mapping from string to block class. We will use the string name as hyperparameter value in our model to choose between the ResNet blocks. Feel free to implement any other ResNet block type and add it here as well."""
resnet_blocks_by_name = {
"ResNetBlock": ResNetBlock,
"PreActResNetBlock": PreActResNetBlock
}
"""The overall ResNet architecture consists of stacking multiple ResNet blocks, of which some are downsampling the input. When talking about ResNet blocks in the whole network, we usually group them by the same output shape. Hence, if we say the ResNet has `[3,3,3]` blocks, it means that we have 3 times a group of 3 ResNet blocks, where a subsampling is taking place in the fourth and seventh block. The ResNet with `[3,3,3]` blocks on CIFAR10 is visualized below.
<center width="100%"><img src="https://github.com/phlippe/uvadlc_notebooks/blob/master/docs/tutorial_notebooks/tutorial5/resnet_notation.svg?raw=1" width="500px"></center>
The three groups operate on the resolutions $32\times32$, $16\times16$ and $8\times8$ respectively. The blocks in orange denote ResNet blocks with downsampling. The same notation is used by many other implementations such as in the [torchvision library](https://pytorch.org/docs/stable/_modules/torchvision/models/resnet.html#resnet18) from PyTorch. Thus, our code looks as follows:
### Q3.
Complete the implemenatation of `ResNet` referring to the description above
"""
class ResNet(nn.Module):
def __init__(self, num_classes=10, num_blocks=[3,3,3], c_hidden=[16,32,64], act_fn_name="relu", block_name="ResNetBlock", **kwargs):
"""
Inputs:
num_classes - Number of classification outputs (10 for CIFAR10)
num_blocks - List with the number of ResNet blocks to use. The first block of each group uses downsampling, except the first.
c_hidden - List with the hidden dimensionalities in the different blocks. Usually multiplied by 2 the deeper we go.
act_fn_name - Name of the activation function to use, looked up in "act_fn_by_name"
block_name - Name of the ResNet block, looked up in "resnet_blocks_by_name"
"""
super().__init__()
assert block_name in resnet_blocks_by_name
self.hparams = SimpleNamespace(num_classes=num_classes,
c_hidden=c_hidden,
num_blocks=num_blocks,
act_fn_name=act_fn_name,
act_fn=act_fn_by_name[act_fn_name],
block_class=resnet_blocks_by_name[block_name])
self._create_network()
self._init_params()
def _create_network(self):
c_hidden = self.hparams.c_hidden
# A first convolution on the original image to scale up the channel size
if self.hparams.block_class == PreActResNetBlock: # => Don't apply non-linearity on output
self.input_net = nn.Sequential(
nn.Conv2d(3, c_hidden[0], kernel_size=3, padding=1, bias=False)
)
else:
self.input_net = nn.Sequential(
nn.Conv2d(3, c_hidden[0], kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(c_hidden[0]),
self.hparams.act_fn()
)
# Creating the ResNet blocks
blocks = []
for block_idx, block_count in enumerate(self.hparams.num_blocks):
for bc in range(block_count):
subsample = (bc == 0 and block_idx > 0) # Subsample the first block of each group, except the very first one.
blocks.append(
self.hparams.block_class(c_in=c_hidden[block_idx if not subsample else (block_idx-1)],
act_fn=self.hparams.act_fn,
subsample=subsample,
c_out=c_hidden[block_idx])
)
self.blocks = nn.Sequential(*blocks)
# Mapping to classification output
self.output_net = nn.Sequential(
nn.AdaptiveAvgPool2d((1,1)),
nn.Flatten(),
nn.Linear(c_hidden[-1], self.hparams.num_classes)
)
def _init_params(self):
# Based on our discussion in Tutorial 4, we should initialize the convolutions according to the activation function
# Fan-out focuses on the gradient distribution, and is commonly used in ResNets
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity=self.hparams.act_fn_name)
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
def forward(self, x):
x = self.input_net(x)
x = self.blocks(x)
x = self.output_net(x)
return x
"""We also need to add the new ResNet class to our model dictionary:"""
model_dict["ResNet"] = ResNet
"""Finally, we can train our ResNet models. One difference to the GoogleNet training is that we explicitly use SGD with Momentum as optimizer instead of Adam. Adam often leads to a slightly worse accuracy on plain, shallow ResNets. It is not 100% clear why Adam performs worse in this context, but one possible explanation is related to ResNet's loss surface. ResNet has been shown to produce smoother loss surfaces than networks without skip connection (see [Li et al., 2018](https://arxiv.org/pdf/1712.09913.pdf) for details). A possible visualization of the loss surface with/out skip connections is below (figure credit - [Li et al.](https://arxiv.org/pdf/1712.09913.pdf)):
<center width="100%"><img src="https://github.com/phlippe/uvadlc_notebooks/blob/master/docs/tutorial_notebooks/tutorial5/resnet_loss_surface.svg?raw=1" style="display: block; margin-left: auto; margin-right: auto;" width="600px"/></center>
The $x$ and $y$ axis shows a projection of the parameter space, and the $z$ axis shows the loss values achieved by different parameter values. On smooth surfaces like the one on the right, we might not require an adaptive learning rate as Adam provides. Instead, Adam can get stuck in local optima while SGD finds the wider minima that tend to generalize better.
However, to answer this question in detail, we would need an extra tutorial because it is not easy to answer. For now, we conclude: for ResNet architectures, consider the optimizer to be an important hyperparameter, and try training with both Adam and SGD. Let's train the model below with SGD:
"""
resnet_model, resnet_results = train_model(model_name="ResNet",
model_hparams={"num_classes": 10,
"c_hidden": [16,32,64],
"num_blocks": [3,3,3],
"act_fn_name": "relu"},
optimizer_name="SGD",
optimizer_hparams={"lr": 0.1,
"momentum": 0.9,
"weight_decay": 1e-4})
"""Let's also train the pre-activation ResNet as comparison:"""
resnetpreact_model, resnetpreact_results = train_model(model_name="ResNet",
model_hparams={"num_classes": 10,
"c_hidden": [16,32,64],
"num_blocks": [3,3,3],
"act_fn_name": "relu",
"block_name": "PreActResNetBlock"},
optimizer_name="SGD",
optimizer_hparams={"lr": 0.1,
"momentum": 0.9,
"weight_decay": 1e-4},
save_name="ResNetPreAct")
"""### Tensorboard log
Similarly to our GoogleNet model, we also have a TensorBoard log for the ResNet model. We can open it below.
"""
# Commented out IPython magic to ensure Python compatibility.
# Opens tensorboard in notebook. Adjust the path to your CHECKPOINT_PATH! Feel free to change "ResNet" to "ResNetPreAct"
# %tensorboard --logdir ../saved_models/lab2/tensorboards/ResNet/
"""<center width="100%"><img src="https://github.com/phlippe/uvadlc_notebooks/blob/master/docs/tutorial_notebooks/tutorial5/tensorboard_screenshot_ResNet.png?raw=1" width="1000px"></center>
Feel free to explore the TensorBoard yourself, including the computation graph. In general, we can see that with SGD, the ResNet has a higher training loss than the GoogleNet in the first stage of the training. After reducing the learning rate however, the model achieves even higher validation accuracies. We compare the precise scores at the end of the notebook.
## [Conclusion]
In this lab, we have had a look at the basic operation of convolution layers and a few convolutional neural network architectures in addition to various features of Pytorch.
After investigating the convolution operation using Pytorch, we have built development environment using the **PyTorch Lightining** library which simplifies the experiment process. Then, we implemented the `Inception` module, `InceptionNet` using the `Inception` module, the `ResNet` block and finally `ResNet`. For logging the training procedure and the test results, we have used **Tendorboard**.
"""