内河船舶交通监管中基于异步轨迹匹配的多模态海事数据融合
郭彧, 刘文*, 瞿晶祥, 卢煜旭, 朱凤华, 吕宜生
arXiv preprint arXiv:2302.11283
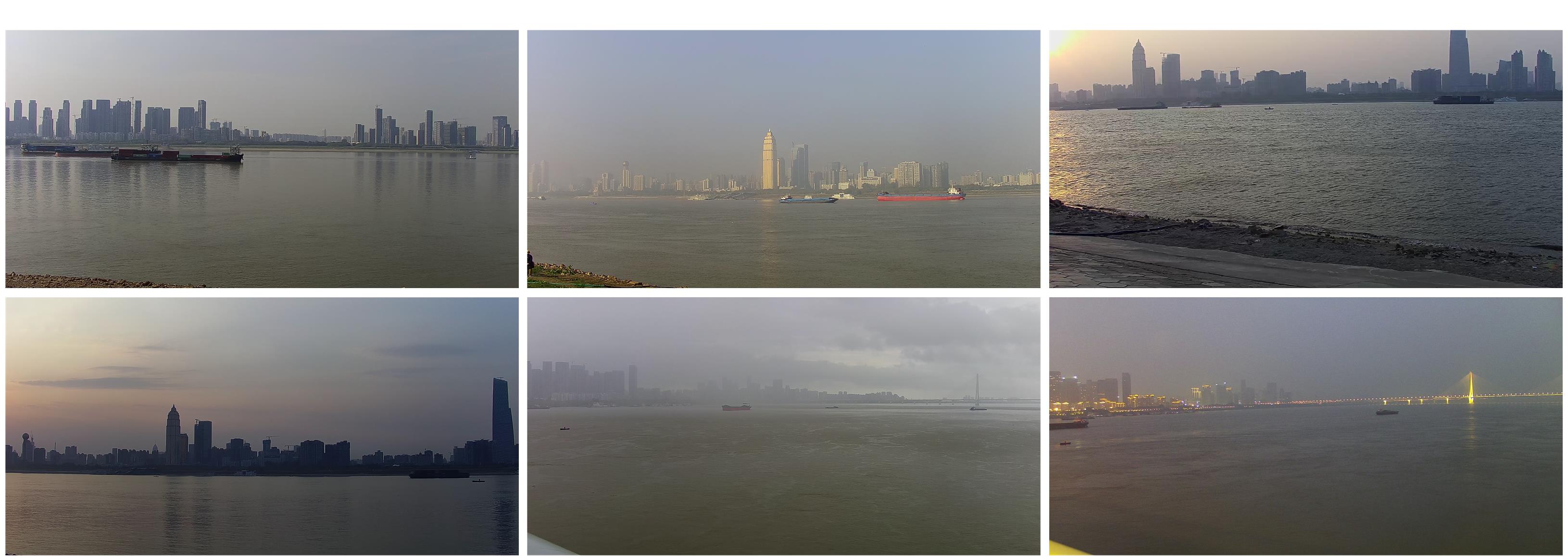
简介: FVessel基准数据集用于评估AIS和视频数据融合算法的可靠性,主要包含海康威视DS-2DC4423IW-D球型摄像机和赛扬AIS9000-08 B类AIS接收机在武汉长江段拍摄的26个视频和相应的AIS数据。为了保护隐私,在我们的数据集中每艘船的 MMSI 已替换为随机数。图1展了FVessel数据集的部分样本。
- 2023.05.07: 9个融合数据(Video-27~Video-35)和3728张用于检测的图片被采集,新的数据将在不久后公开。
- 2023.01.12: 我们公开了FVessel_V1.0数据集,其中包含26个融合数据和7625张用于检测的图像。
FVessel数据集包含两部分:
- 01_Video+AIS
- 02_Image+xml
01_Video+AIS包含大量个视频和对应的AIS数据以评估数据融合算法的性能。每一个视频数据包含如下文件:
|-ais
|-2022_05_10_19_21_04.csv
|-[Number, MMSI, Lon, Lat, Speed, Course, Heading, Type, Timestamp]
└─...
|-2022_05_10_19_21_05.csv
|-2022_05_10_19_21_06.csv
└─... (ais data)
|-2022_05_10_19_21_05_19_31_10_b.mp4
|-camera_para.txt
|-[Lon, Lat, Horizontal Orientation, Vertical Orientation, Camera Height, Horizontal FoV, Vertical FoV, fx, fy, u0, v0]
|-gt
|-Video-02_gt.mp4
|-Video-02_gt_detection.txt
|-<second>, <0>, <bb_left>, <bb_top>, <bb_width>, <bb_height>, <conf>, <x>, <y>, <z>
└─...
|-Video-02_gt_tracking.txt
|-<second>, <id>, <bb_left>, <bb_top>, <bb_width>, <bb_height>, <conf>, <x>, <y>, <z>
└─...
└─Video-02_gt_fusion.txt
|-<second>, <mmsi>, <bb_left>, <bb_top>, <bb_width>, <bb_height>, <conf>, <x>, <y>, <z>
└─...
-
(a) AIS文件
每个csv文件包含十分钟内的AIS数据并且仅保存每艘船舶最近时刻的数据。
2022_05_10_19_21_04.csv
序号 MMSI 经度 纬度 航速 航向 船首向 类型 时间戳 0 100000000 114.325327 30.60166 0 293.6 511 18 1652181559844 1 130000000 114.302683 30.58059 6.8 33.6 33 18 1652181659157 2 140000000 114.31004 30.599997 3.9 215.6 511 18 1652181655147 3 600000000 114.3156 30.59773 7.2 39.6 511 18 1652181649704 ... ... ... ... ... ... ... ... ... 2022_05_10_19_21_05.csv
2022_05_10_19_21_06.csv
... -
(b) 视频
2022_05_10_19_21_05_19_31_10_b.mp4
开始时间: 2022_05_10_19_21_05 结束时间: 2022_05_10_19_31_10 类型: b/r (桥区/江边)
-
(c) 相机参数
camera_para.txt
经度 纬度 水平朝向 俯仰角 相机高度 水平视场角 垂直视场角 fx fy u0 v0 114.32583 30.60139 7 -1 20 55 30.94 2391.26 2446.89 1305.04 855.214 fx, fy, u0, 和v0是相机内参矩阵。
-
(d) GT (真实情况:采用多目标跟踪MOT格式)
Video-02_gt.mp4
包含真实情况的视频,每秒仅一次。
Video-02_gt_detection.txt
<秒>, <0>, <边界框_左>, <边界框_上>, <边界框_宽度>, <边界框_高度>, <置信度>, <x>, <y>, <z>Video-02_gt_tracking.txt
<秒>, <id号>, <边界框_左>, <边界框_上>, <边界框_宽度>, <边界框_高度>, <置信度>, <x>, <y>, <z>Video-02_gt_fusion.txt
<秒>, <mmsi>, <边界框_左>, <边界框_上>, <边界框_宽度>, <边界框_高度>, <置信度>, <x>, <y>, <z> -
V1.0 (26个视频)
视频名称 视频时长 类型 天气 船舶遮挡次数 船舶总数 AIS船舶总数 01 10m07s 桥区 弱光 2 5 4 02 19m52s 桥区 晴天 6 7 6 03 19m14s 江边 晴天 6 5 5 04 06m10s 江边 晴天 0 1 1 05 15m01s 江边 晴天 2 5 5 06 12m49s 江边 晴天 2 4 4 07 03m38s 江边 晴天 1 2 2 08 16m05s 江边 晴天 3 6 5 09 05m25s 江边 晴天 0 1 1 10 11m17s 桥区 多云 2 3 1 11 05m18s 江边 晴天 1 3 3 12 07m19s 江边 晴天 1 4 4 13 12m58s 江边 晴天 5 6 6 14 03m58s 江边 晴天 3 4 4 15 10m46s 江边 晴天 0 4 4 16 05m05s 江边 晴天 0 1 1 17 08m08s 江边 晴天 1 2 2 18 23m57s 江边 晴天 10 10 6 19 11m28s 江边 弱光 0 2 2 20 14m10s 江边 弱光 0 3 3 21 24m01s 江边 弱光 4 7 6 22 02m40s 江边 弱光 0 2 1 23 19m24s 江边 晴天 2 4 4 24 08m39s 江边 晴天 2 3 3 25 24m05s 江边 晴天 4 8 8 26 07m26s 江边 晴天 0 5 5
02_Image+xml包含大量海事图像以及对应的用于目标检测网络训练的xml文件,该数据集只有一类"vessel"。
|-JPEGImages
|-000001.png
|-000002.png
|-000003.png
└─... (image data)
|-Annotations
|-000001.xml
|-<vessel>, <x1>, <y1>, <x2>, <y2>
└─...
|-000002.xml
|-000003.xml
└─... (xml data)
└─-ImageSets
- V1.0 (7625张图像)
| 名称 | 百度网盘 | Onedrive |
|---|---|---|
| link | https://pan.baidu.com/s/1-VNeZvWqYh7ESLXQxreCDg | https://1drv.ms/u/s!As3rCDROnrbLeWE-RMXAGbwAMa4 |
| code | MIPC |
-
将数据复制到本项目的
01_demo_transform/data路径下. -
运行
01_demo_transformc/main.py.
案例:[mipc]
220344086-5684a8e8-cb73-4786-a8dc-bdc9f68b5a35_3.mp4
(蓝线是基于AIS数据的轨迹在图像中的投影,红色字母是对应的mmsi号。)
-
安装motmetrics;
-
将此项目的
02_demo_metric/motmetrics中的两个文件复制到已安装的motmetrics文件夹中; -
将测试文件保存到
02_demo_metric/sample文件夹; -
选择评估类型
detection,tracking, 和fusion; -
运行
02_demo_metric/eval.py。
以下视频展示了我们提出的 DeepSORVF 数据融合结果。
220344086-5684a8e8-cb73-4786-a8dc-bdc9f68b5a35_1.mp4
非常感谢武汉理工大学计算机与人工智能学院的苏建龙进行的数据采集和算法实现工作。
我们将采集更多不同场景的数据以扩充数据集。
@article{guo2023asynchronous,
title={Asynchronous Trajectory Matching-Based Multimodal Maritime Data Fusion for Vessel Traffic Surveillance in Inland Waterways},
author={Guo, Yu and Liu, Ryan Wen and Qu, Jingxiang and Lu, Yuxu and Zhu, Fenghua, and Lv, Yisheng},
journal={IEEE Transactions on Intelligent Transportation Systems},
year={2023}
}